Robot Sumo
Le SUMO est un style de lutte traditionnel japonais. Les lutteurs essaient de se pousser hors du ring.
Plus ils sont lourds, plus il est difficile de les pousser hors du ring.
Eh bien, nous ne vous opposerons pas à un vrai lutteur japonais de sumo; vous auriez autant de chance de réussir que le jeune dans la photo ci-dessus! Mais nous pourrions nous amuser à fabriquer des modèles de lutteurs Robot SUMO.
Robot SUMO en lutte
Nous ne respecterons pas les règles officielles de Mini Robot SUMO, nous cherchons simplement à produire des robots SUMO pour le plaisir; (mais si vous êtes intéressé par la lecture du règlement officiel, vous pouvez en voir un résumé à l’adresse http://www.robotroom.com/SumoRules.html).
Le but:
Pousser les autres robots hors de l’anneau, tout en restant dans l’anneau.
Le ring:
Le mini ring officiel mesure environ 75 cm de diamètre, peint en noir avec une bande blanche sur le pourtour.
Les robots:
Les robots SUMO mesurent 20 cm par 20 cm maximum. Leur poids ne devra pas dépasser 500 g. Vous pouvez les construire de la manière la plus ingénieuse possible, de manière à ce qu’ils soient capables de pousser votre adversaire hors du ring.
Le combat:
Les robots seront placés à l’intérieur du ring, l’un en face de l’autre. Ils doivent être contrôlés uniquement par votre programme informatique; vous n’êtes pas autorisé à les pousser à la main!
Le programme:
Vous pourrez utiliser n’importe quel langage de programmation, soit graphique soit code.
Comment écrire rapidement un programme qui permettra à notre robot de pousser le robot de l’autre équipe hors du ring? – Pensez-y…
La victoire:
marquer trois points pour une victoire et un pour une défaite; le gagnant est le robot avec le plus de points après 2 combats. Si les robots sont égaux après deux combats, un troisième combat décisif est exécuté.
La conception du robot:
Vous pouvez utiliser tous types de robots pour commencer, puis les modifier plus tard, si vous pensez que cela vaut la peine de les modifier.
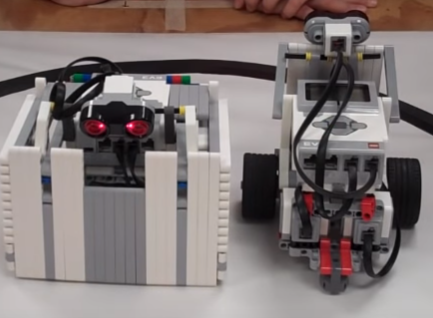
L’idée d’un robot mini sumo est illustrée ci dessus. L’idée est que un appendice soulèvera les roues du robot adverse, ce qui facilitera le déplacement de l’adversaire hors de la patinoire.
Vous pouvez trouver des modèles de robots ici :
http://www.edurobot.ch/?p=1032
http://www.damienkee.com/robots/
Mais est-ce la seule façon de construire un robot SUMO? – Votre idée peut être meilleure!
Stratégie – et autres options sournoises…
Quelles sont les possibilités – l’une des pratiques suivantes est-elle pratique?
• Utilisez un “bloc aléatoire” afin que votre robot ne tourne pas la même quantité chaque fois qu’il revient du bord de la patinoire (est-ce utile)?
• Utilisez une feuille avant presque plate (à glisser sous les roues d’un adversaire)?
• Utilisez plus de deux roues motorisées (pour donner à votre robot plus de «punch»)?
• Utilisez des roues plus petites ou plus grandes (quelle serait la meilleure?)
• Utilisez des chenilles au lieu de roues (cela aiderait-il)?
• Utilisez une sorte de bélier (un troisième moteur pour assommer votre adversaire)?
• Utilisez sonar (pour trouver votre adversaire afin de pouvoir le recharger avant qu’il ne vous reproche)?
Pouvez-vous penser à d’autres options en plus de celles mentionnées ci-dessus? Vous pouvez essayer beaucoup de choses – laquelle est la meilleure pour votre robot en pratique?
Pas d’idée:
Faites des recherches sur le net!
Mais vos idées sont bonnes!
Commencez à rivaliser avec vos mini lutteurs SUMO!
Que le meilleur robot gagne…
Bonne chance – Amusez-vous – Profitez-en!
Radar vélo
Vous allez réaliser un radar de vélo .
Garmin commercialise un accessoire de ce type voir la vidéo .

Ce radar détecte les véhicules arrivant de l’arrière, l’avertisseur lumineux se modifie lorsque un véhicule se rapproche et la distance entre le véhicule et le cycliste s’affiche sur le compteur Garmin.
Pour cela vous réaliser un projet avec une carte Arduino un capteur ultrason et un afficheur lcd ou autre.
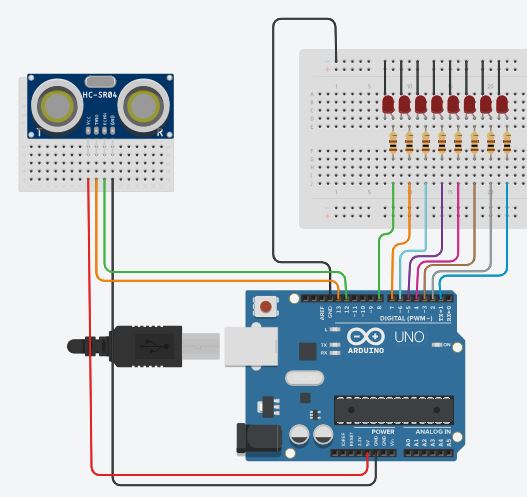
pour commencer vous aller devoir concevoir un chenillard de Leds et mesurer une distance avec le capteur ultrason .
Répartissez vous les taches et au travail.
Apprendre les bases de la programmation avec Python
Pour apprendre les bases de la programmation informatique, on utilisera le langage Python.
Python et son éditeur (Python IDE) sont disponibles sur les ordinateurs du lycée (c’est la version 3 qui est installée).
On utilisera comme ressource les cours de David Roche (enseignant au lycée Guillaume Fichet de Bonneville en Haute-Savoie) et de Fabrice Sincère (enseignant au lycée Algoud-Laffemas de Valence, dans la Drôme).
Continuer la lecture de Apprendre les bases de la programmation avec Python
Exposés 2018-2019
Les exposés sont à faire sous la forme d’une page internet de votre site. Lors de la présentation n’hésitez pas à montrer en direct ce que vous avez fait (par exemple ouvrir un fichier avec un éditeur html ; afficher le code source d’un e-mail ; utiliser les fonctions de développement d’un navigateur, etc.).
Indiquer les sources que vous avez utilisées (notamment l’origine de vos illustrations).
Annexe : Grille d’évaluation des exposés
Site Web ISN 2018-2019
Nous envoyer l’adresse de votre site via l’ENT dès qu’il est en ligne.
- BEAL Lucas [site raidghost ; site de secours]
- BERTHOD Elie
- BLANC Léonie
- BLANCARD Ana
- BRUNEL Dorian
- CLOT Morgan
- COSTE Pauline
- DESMARTIN Margot [ancien site sur raidghost]
- DUCLAUX Paulin [ancien site]
- DUCLAUX Tristan
- JARDEL Stella
- MAURIN Oscar
- NABETH Arnaud
- PASCUAL Melyssa
- PELISSON Mathis
- PONCET Sarah
- PRUNARET Judith
- RAMADIER Loïck
- REZZAOUI Tasnim
- RULLIERE Hugo
- SELETTE Hugo-Pierre
- SEUX Tommy [site de secours]
Mini-projet : créer son site internet
Activités du mini-projet :
Projet: Voir comme un daltonien
Fonctionnalités attendues :
- Le projet sera réalisé en javascript avec la bibliothèque p5.js.
- L’application devra fonctionner aussi bien sur PC ou smartphone et s’adapter à la taille de l’écran.
- Capturer une image ou une vidéo avec soit une webcam soit le capteur intégré de votre tablette ou smartphone.
- Modifier une image ou une vidéo pour en faire un rendu correspondant à la vision d’un daltonien.
- Proposer un test de dépistage du daltonisme.
Ressources :
Projet : Ramasse et évite
Fonctionnalités attendues :
- Le projet sera réalisé en javascript avec la bibliothèque p5.js.
- Le jeu devra fonctionner aussi bien sur PC que sur smartphone et s’adapter à la taille de l’écran.
- Le but du jeu est de récupérer plusieurs objets, dans l’ordre sur une carte. Il faut éviter les ennemis.
- Le personnage du joueur est toujours au centre de l’écran. On clique ou touche l’endroit ou on veut qu’il aille et la vue se déplace de manière à ce que le personnage se retrouve au bon endroit.
- Une minicarte permet d’avoir un vue global du terrain.
- Deux cartes seront proposées : une carte préprogrammée et une carte construite de manière aléatoire.
- Il sera possible de mettre le jeu en pause, et de sauvegarder. Le jeu devra pouvoir être repris même après redémarrage de l’ordinateur ou du smartphone.
- Le jeu débutera sur un écran d’accueil, permettant de choisir le mode, de régler les paramètres (comme le type de carte, aléatoire ou non), d’afficher les meilleurs score ou de reprendre une sauvegarde.
- Les meilleurs score réalisé sur l’ordinateur seront affichés en fin de partie. Les meilleurs scores seront conservés même après redémarrage de l’ordinateur ou du smartphone.
Projet : GPS et cartographie
Fonctionnalités attendues :
- Le projet sera réalisé en javascript avec la bibliothèque p5.js.
- L’application devra fonctionner aussi bien sur PC que sur smartphone et s’adapter à la taille de l’écran.
- Utiliser le traceur GPS dont vous disposez et récupérer le fichier avec les données d’un déplacement.
- Afficher une carte .
- Placer une zone de texte ou le code du fichier du GPS sera collé.
- Exploiter le contenu du la zone de texte pour extraire les données pertinentes (longitude et latitude).
- Utiliser ces données pour afficher une carte et le trajet suivi.
- Extraire d’autre données : altitude, vitesse…
- Proposer d’autres exploitations des données : affichage d’un profile d’altitude du parcours, détermination de la vitesse moyenne…
Ressources :