- Fonctionnement du capteur de suivi de ligne
Le capteur que nous allons utilisé est un capteur de contraste. Il est constitué d’une LED émettrice et d’un photo-transistor.
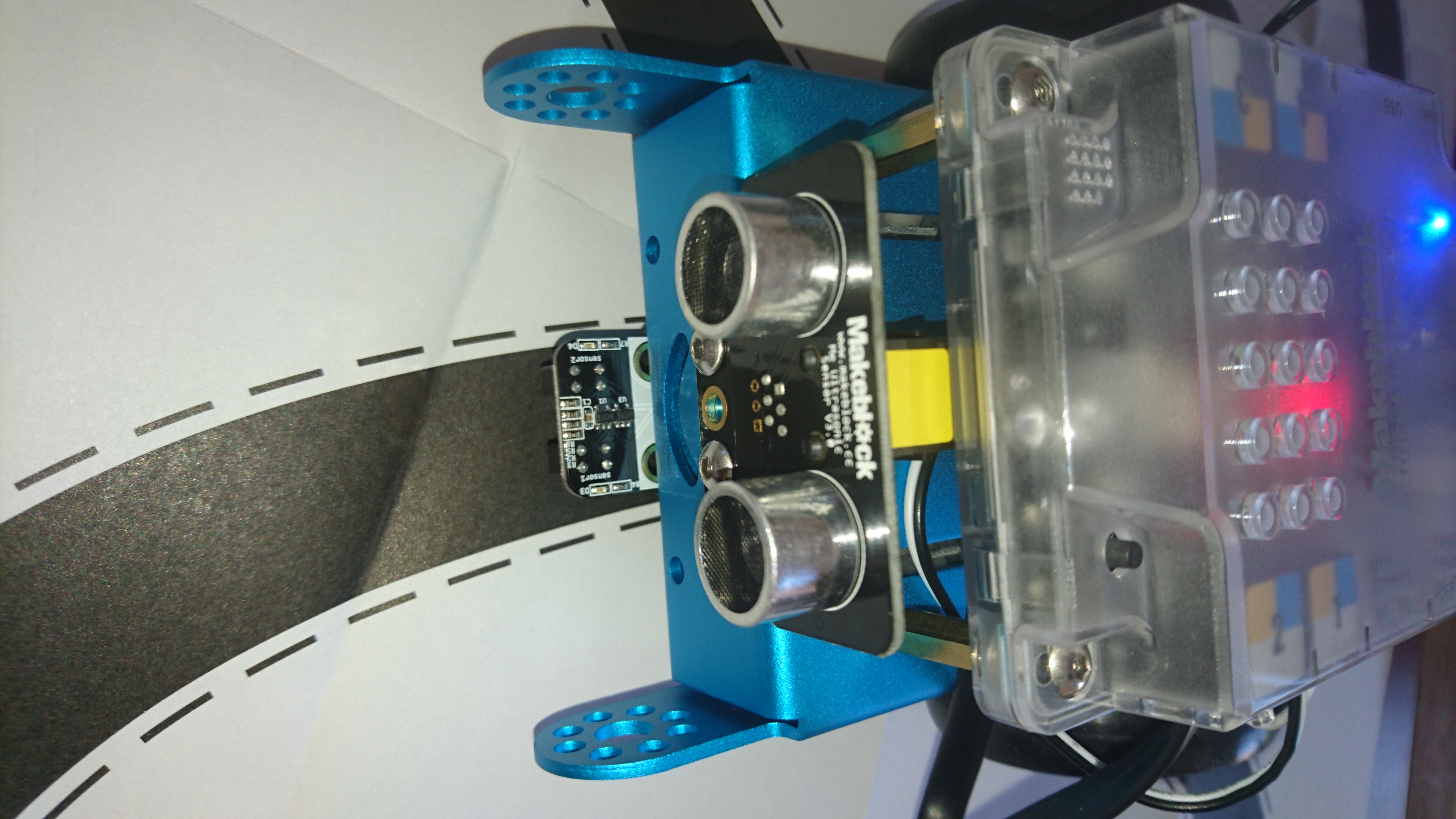
Le capteur du robot:

La LED émettrice envoie une lumière infrarouge que le sol réfléchit en direction du photo-transistor qui capte ainsi la quantité de lumière en retour.
Schéma de principe:

Comme les couleurs foncées réfléchissent moins bien la lumière que les couleurs claires, le capteur peut ainsi définir s’il se trouve au dessus d’une couleur clair (lorsqu’il reçoit beaucoup de lumière), il prend alors la valeur 1, ou s’il se trouve au dessus d’une couleur foncée (lorsqu’il reçoit peu de lumière), il prend alors la valeur 0 (zéro).
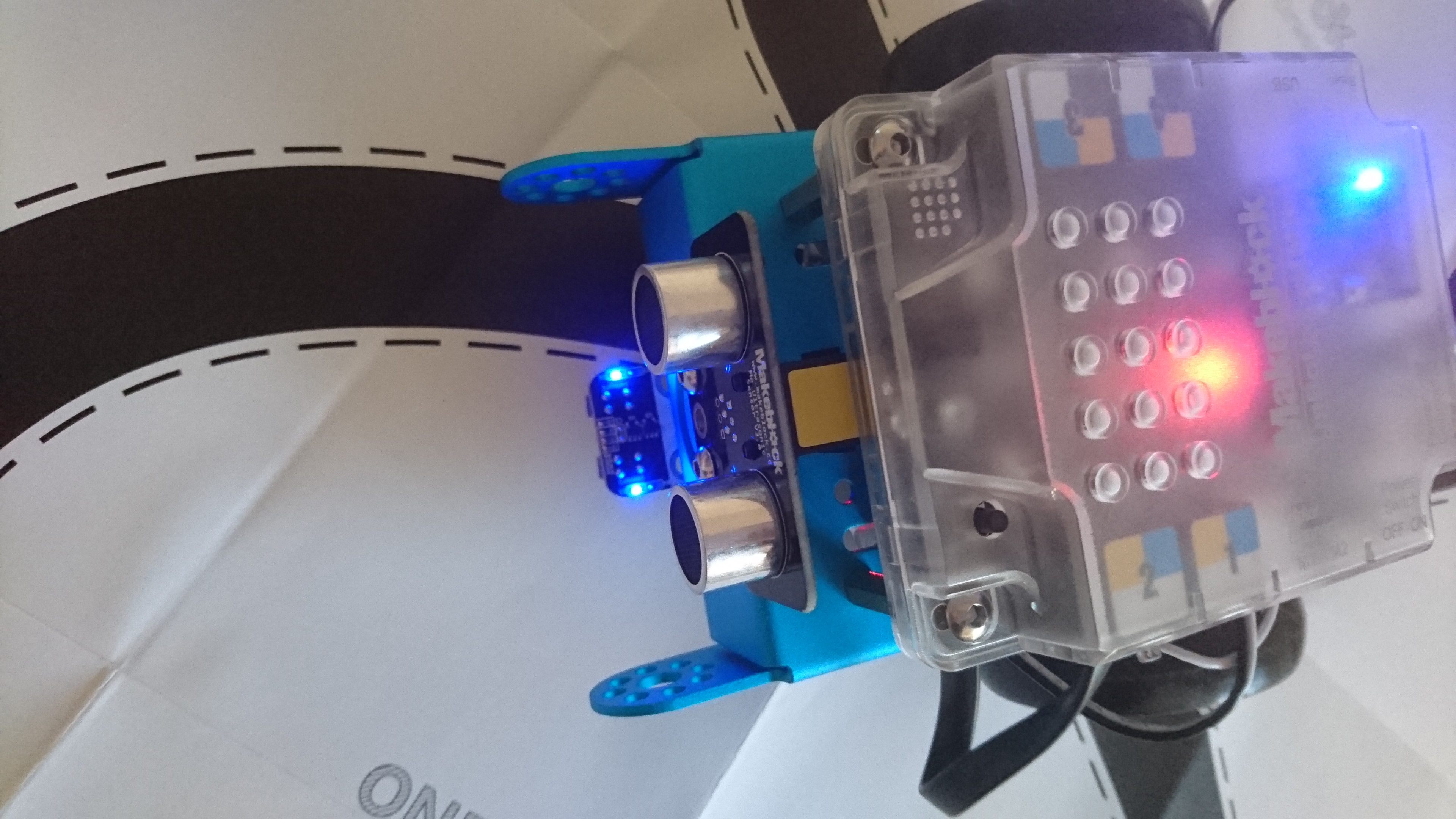
Notre robot possède deux capteurs de suivi de ligne à l’avant. Ils sont situés l’un à coté de l’autre, l’un a droite du centre du robot, l’autre à gauche.
mBlock met à disposition du programmeur une instruction qui permet de lire la valeur des deux capteurs en même temps.
Il s’agit de l’instruction « état du suiveur de ligne sur port2 »

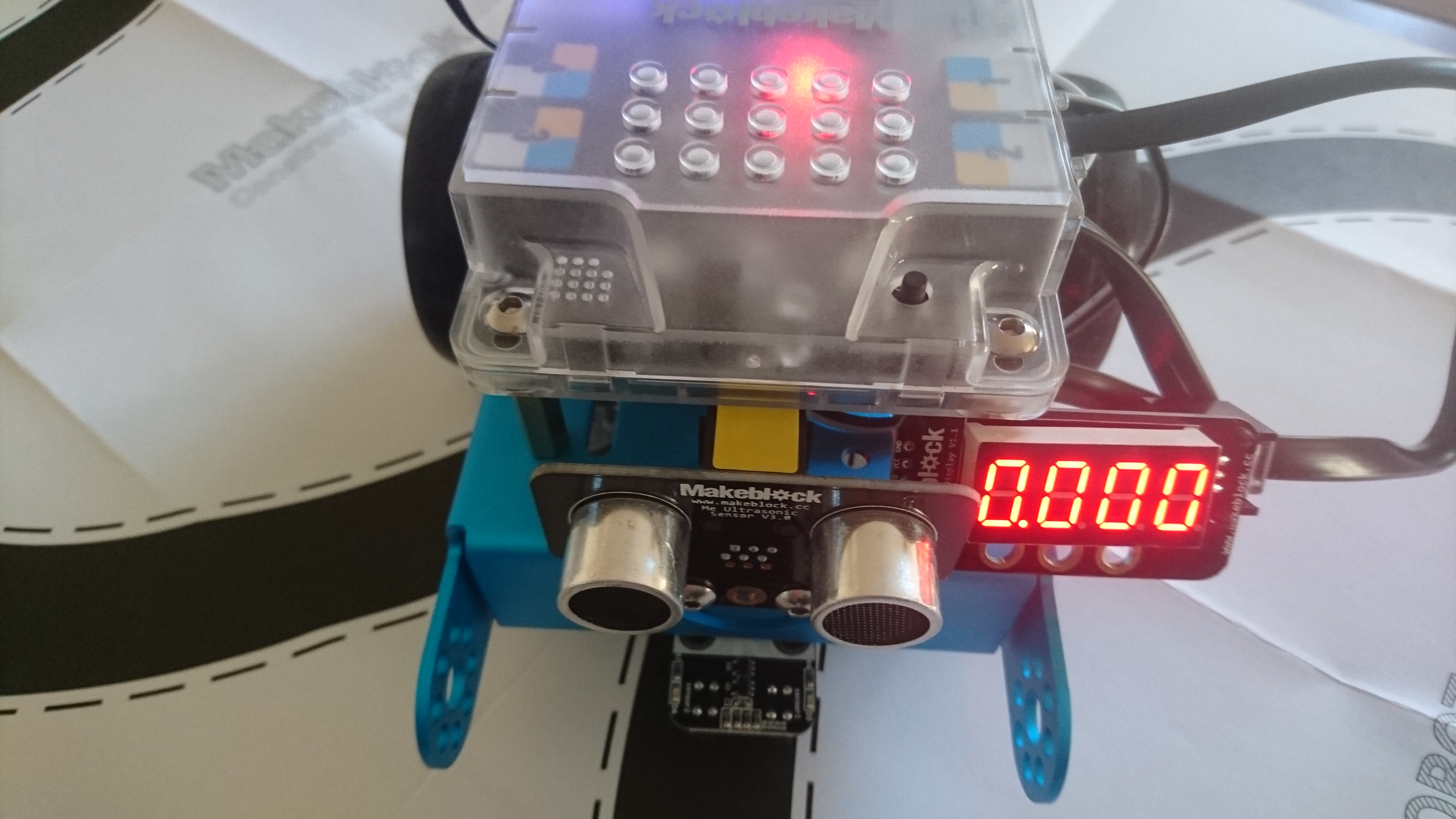
Lorsque les deux capteurs détectent une couleur claire la valeur état suiveur est à 3.
ici valeur envoyée sur afficheur à led avec ce programme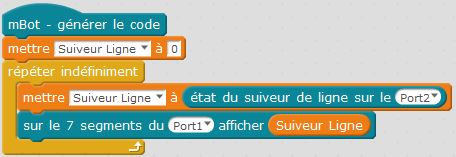

ou

Lorsque le capteur de droite détecte une couleur claire et le capteur de gauche détecte une couleur foncée la valeur état suiveur est à 1.
Lorsque le capteur de droite détecte une couleur foncée et le capteur de gauche détecte une couleur claire la valeur état suiveur est à 2.

Lorsque les deux capteurs détectent une couleur foncée la valeur état suiveur est à 0.
Que faire quand?
Précise comment tu prévois les actions à entreprendre pour suivre la ligne

{kind=link}


Un peu d’ordre description du programme par un algorigramme
voici un document ressources établi par Laurent Proust Lycée Jean Moulin
doc-ressource_algorithmie-version-boissy





